|
|
МЕТОДЫ ИЗМЕРЕНИЯ СКОРОСТИ ПОЛЕТА⇐ ПредыдущаяСтр 21 из 21
Для измерения параметров движения летательного аппарата относительно воздуха (индикаторной скорости, ИВС и числа М) применимы манометрический, термодинамический, тепловой, турбинный и ультразвуковой методы. Путевая скорость летательного аппарата определяется с помощью следующих методов: методом решения навигационного треугольника скоростей, методом визирования земной поверхности, методом, основанным на эффекте Доплера, инерциальным методом. Рассмотрим сущность некоторых из этих методов. 1. Манометрический метод [1]
Манометрический метод основан на измерении разности между полным и статическим давлением встречного потока воздуха (рП — рсТ) или отношения этих давлений (pП /pсТ)-
Давления рп и рст воспринимаются приемниками воздушного давления, расположенными снаружи летательного аппарата (рис. 12.2, а). Приемник полного давления представляет собой трубку, направленную открытым концом навстречу набегающему потоку воздуха, приемник статического давления рассмотрен ранее (см. § 11.4)..,' Приемники полного и статического давления часто объединяют в комбинированный приемник воздушного давления (ПВД), схема включения которого приведена на рис. 12.2, б. От приемников давления рП и рСТ передаются по трубопроводам дифференциальному манометру или датчику давления, которые воспринимают динамическое давление рДин=рП - рсТ и преобразуют его в перемещение отсчетного устройства или в электрический сигнал. Манометр, измеряющий рдин, можно отградуировать в единицах индикаторной скорости Vi. Манометрический метод позволяет также вычислить число М, являющееся функцией отношения давлений: М = f(pп /Pст). Если, кроме рп и рСТ, измеряется температура Т окружающей среды, то можно вычислить ИВС, являющуюся функцией отношения давлений и температуры:
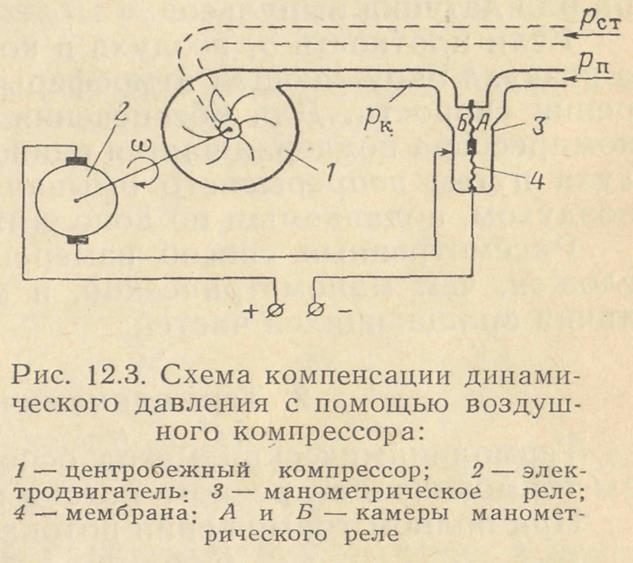
Вывод формул, устанавливающих зависимость величин Vi, M и V от измеряемых параметров (рп, рст и Т), приводится в § 12.3. Измерение давлений и вычисление величин Vi, V и М производится с помощью манометрических указателей и датчиков, которые рассматриваются более подробно в § 12. 4—12. 6. Определение ИВС возможно также по компенсационной схеме, основанной на автоматическом уравновешивании полного давления рп встречного потока воздуха давлением рк, развиваемым воздушным компрессором (рис. 12.3). Полное давление рп от приемника воздушного давления подается в полость А дифференциального манометрического реле 3, в другую полость Б поступает давление рк от центробежного компрессора /, приводимого во вращение электродвигателем 2, управляемым от контактов манометрического реле. Входное отверстие компрессора сообщается со статическим давлением рот (см. пунктир на рис. 12.3). Если Ра>рк, то мембрана 4 прогибается и замыкает цепь электродвигателя, который набирает обороты до тех пор, пока рк не увеличится до величины рп, после чего контакт размыкается, давление рк падает, контакт снова включается и т. д. Таким образом, поддерживается такая угловая скорость вращения компрессора, при которой рк=рп Полное давление приблизительно (без учета сжимаемости воздуха) равно
а давление компрессора
где С — постоянный коэффициент. Отсюда следует, что при равенстве рп = Рк и q1 = q угловая скорость Если плотность Q1 воздуха в компрессоре не равна плотности g воздуха окружающей атмосферы, возникает погрешность измерения скорости. Для обеспечения равенства q1 = q температура компрессора поддерживается равной температуре наружного воздуха путем непрерывного омывания корпуса насоса наружным воздухом, подаваемым по дополнительной трубе. Рассмотренный способ измерения ИВС в реализации более сложен, чем манометрический, и менее надежен вследствие наличия вращающихся частей. Термодинамический метод
Термодинамический метод основан на измерении температуры торможения встречного потока воздуха. При полном торможении потока
При неполном торможении
где r -—коэффициент торможения, зависящий от конфигурации препятствия, расположенного в потоке воздуха, и от точки поверхности, в которой измеряется температура. Если поместить в воздушном потоке два датчика температуры (термопары, термосопротивления и т. п.) с одинаковыми характеристиками и с различными, не зависящими от числа М коэффициентами торможения r1 и r 2, то сигналы датчиков будут соответственно
где T1 и Т2 – температуры, измеренные датчиками, S – чувствительность датчиков. Отношение сигналов u1 и и2 не зависит от Т:
откуда
Если по формуле (12.5) построить счетно-решающую схему, на вход которой поступают сигналы и1 и и2, то сигнал на выходе будет пропорционален М. Можно вывести также формулу для определения истинной воздушной скорости по значениям сигналов u1 и и2. Выражения для u1 и и2 можно переписать в виде
Разность сигналов
Имея в виду, что
Заменяя М2а2=V2, определяем
По формуле (12.7) может быть построен термодинамический измеритель ИВС. 3. Тепловой метод [11]
Тепловой метод основан на зависимости теплоты, теряемой нагретым телом, от скорости потока воздуха, обдувающего это тело. Применительно к измерению расхода жидкости этот метод был рассмотрен в гл. IX. При измерении скорости потока воздуха может быть использована одна из схем, изображенных на рис. 9.8. В обеих схемах чувствительным элементом служит проволочная нить, нагреваемая протекающим по ней электрическим током. Зависимость температуры нити Тп от скорости потока определяется из условия баланса выделяемого в единицу времени тепла Q1 и отдаваемого тепла Q2. Выделяемое тепло Q1=0,24i2R. Отдаваемое тепло где Т — температура окружающей среды; k, q и cv — соответственно теплопроводность, плотность и теплоемкость воздуха при постоянном объеме; d — диаметр нити. Приравнивая Q1 и Q2, определяем температуру нити:
Из формулы (12.8) следует, что температура нити является нелинейной функцией скорости и зависит также от параметров окружающей атмосферы. Достоинством метода является малая инерционность преобразования скорости потока в электрическую величину, что делает этот метод пригодным для измерения быстроизменяющихся процессов, например для исследования турбулентности воздушного потока. Недостаток метода — зависимость результата измерения от ряда переменных параметров атмосферы. Турбинный метод
Турбинный метод основан на использовании кинетической энергии потока воздуха для вращения турбины, установленной в подшипниках с малым трением. Турбина может быть тангенциальной или аксиальной. Простейшим вариантом тангенциальной турбины является крестовина с четырьмя или более полушариями на концах (рис. 12.4, а). Если пренебречь моментом трения в подшипниках, то установившаяся скорость вращения крестовины, определяемая из условия равенства моментов сил, действующих на верхнее и нижнее полушария, будет
где K1 и К2 — аэродинамические коэффициенты сопротивления верхнего и нижнего полушарий. Скорость вращения можно преобразовать в электрическое напряжение (с помощью тахогенератора) или в электрические импульсы. Аксиальная турбина, выполненная в виде крыльчатки с наклонными лопастями, изображена на рис. 12.4, б.
Если ось турбины нагружена дополнительным моментом, то ее угловая скорость перестает быть пропорциональной ИВС и возникает погрешность измерения скорости потока. Недостатком метода является относительно низкая надежность турбины в связи с возможностью ее обледенения, загрязнения подшипников и механических повреждений. Ультразвуковой метод
Ультразвуковой метод основан на том, что при распространении звуковых колебаний в потоке воздуха вектор скорости звука относительно летательного аппарата равен векторной сумме скорости звука относительно воздуха и воздушной истинной скорости летательного аппарата. Этот метод описан в гл. IX (стр. 249).
Число М может измеряться также при излучении звуковых колебаний в направлении, перпендикулярном потоку. Источником ультразвука является пьезоэлемент 1 (рис. 12.5), приемниками служат два пьезоэлемента 2 и 3, расположенные один за другим по потоку и смещенные относительно элемента 1 на величину b. Приемники установлены так, что при скорости потока, равной нулю, их сигналы одинаковы по величине. При движении летательного аппарата с некоторой скоростью V ультразвуковой пучок отклоняется по направлению потока; величина s смещения пучка вдоль линии, соединяющей приемники 2 и 3, определяется из соотношения откуда
Следовательно, величина s пропорциональна числу м. Измерение числа М может производиться двумя способами: а) измерением отношения амплитуд выходных сигналов пьезоэлементов 2 и 5; б) непрерывным перемещением пьезоэлементов 2 и 3 относительно элемента 1 вдоль потока (или перемещением элемента 1 относительно элементов 2 и 3) с помощью следящей системы так, чтобы разность выходных сигналов элементов 2 и 3 равнялась нулю; при этом величина s перемещения подвижных пьезоэлементов будет определяться по формуле (12.9). Последний способ позволяет непосредственно определять число М, но в реализации он менее надежен из-за расположения подвижных частей вне летательного аппарата в открытом потоке воздуха. Литература.
1. Алпаров А.У., Дмитриев С.В., Павлов Е.Г. Элементы автоматических приборных устройств. Лабораторный практикум. Казань.: КАИ, 1988, 32с. 2. Боднер В.А. Авиационные приборы. М.: Машиностроение, 1969. 3. Брасловский Д. А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970 г. 4. Виглеб Г. Датчики. М.: Мир, 1989. 5. Кобус А., Тушинский Я., Датчики Холла и магниторезисторы М.: Энергия 1971. 6. Коптева Ю.Н. Датчики теплофизических и механических параметров. М.: Энергия, 1998. 7. Красовский А.Л., Поспелов Г.С. Основы автоматики и технической кибернетики: М.- Л.: Госэнергоиздат, 1982, 726с. 8. Куликовский К. Л., Купер В. Я. Методы и средства измерений.М.1986. 9. Колосов С. П., Калмыков И. В., Нефёдова В. И. Элементы автоматики. М.: Машиностроение, 1984 г. 10. Минкин С.В., Шашков А.Г. Позисторы. Библиотека по автоматике, вып. 498. М.: Энергия, 1973. 11. Ротберт И.Л., Удалов Н.П. Электронные устройства силовых установок. М.: Машиностроение, 1971. 12. Сотсков Б.С. Основы расчёта и проектирования электромеханических элементов автоматических и телемеханических устройств. М. - Л.: Энергия, 1965, 465с. 13. Турчин А. М. Электрические измерения неэлектрических величин. М.: Энергия,1966 14. Удалов Н.П. Полупроводниковые датчики. М.: Энергия, 1965. 15. Хомерики О. К. Применение гальваномагнитных датчиков в устройствах автоматики и измерений. М.: Энергия, 1971.
  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 .
.
 ,
, ,
, пропорциональна V. Преобразование
пропорциональна V. Преобразование  .
. ,
,



 , и подставляя это значение в уравнение (12.6), получим
, и подставляя это значение в уравнение (12.6), получим .
. .
. ,
, .
. ,
,


 ,
, .
.