|
|
ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЦЕПЯХС ПОЛУПРОВОДНИКОВЫМИ ТЕРМОРЕЗИСТОРАМИ.
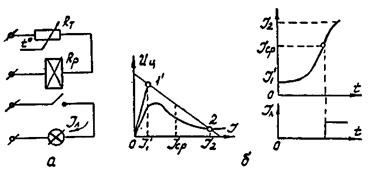
Различают два режима работы ПТР – линейный и нелинейный. Линейный режим работы соответствует начальному (линейному) участку ВАХ, когда ток, протекающий через терморезистор, не вызывает заметного разогрева его рабочего тела и его сопротивление определяется только температурой окружающей среды Т0. В линейном режиме работы ПТР рассматривается как безинерционное сопротивление. Нелинейный режим работы терморезистора соответствует превышению температуры Т- рабочего тела ПТР над температурой окружающей среды (Т > Т0) на некоторую величину, пропорциональную рассеиваемой мощности, т.е. рабочая точка лежит на нелинейном участке ВАХ. При нелинейном режиме работы, в случае изменения одного или нескольких параметров, характеризующих режим работы цепи (Uц, Т0, b, r) возникает переходный процесс, который сопровождается перемещением рабочей точки, а следовательно, изменением тока в цепи (рис. 2.1). Переходный процесс сопровождается разогревом рабочего тела ПТР протекающим по нему током. При этом мощность, выделяемая на ПТР, частично рассеивается в окружающую среду, а частично идет на повышение температуры ПТР, т.е. в любой момент переходного процесса справедливо уравнение:
где
Н - теплоемкость, Вт·с/град; t - время, с; Т - мгновенное значение температуры ПТР, К; Т0 - температура окружащей среды, К; b - коэффициент рассеяния, Вт/град. Для расчета переходного процесса, когда известна статическая ВАХ ПТР. удобно использовать выражение:
где UkIk=b(T-T0) – мощность, рассеиваемая на ПТР в установившемся режиме нагрева. Располагая графиком зависимости скорости изменения температуры от самой температуры
Характер и продолжительность переходного процесса, вызванного скачкообразным изменением параметров цепи, будут меняться в зависимости от значений этих параметров и их комбинаций. Время протекания переходных процессов, возникающих в электрической цепи содержащей ПТР, может быть использовано для получения выдержек времени различной продолжительности. Простейшая схема реле времени состоит из электромагнитного реле, включенного последовательно с ПТР (рис.2.2). Выдержка осуществляется за счет времени, необходимого для нарастания тока до значения тока срабатывания реле. Началом отсчета является момент подключения цепи с ПТР к источнику напряжения.
Позисторы. Позисторами называются объемные полупроводниковые резисторы с положительным температурным коэффициентом сопротивления.(ТКС) Материалом для изготовления позисторов служит титианат бария BaTiO3, легированный примесями редкоземельных элементов, таких как стронций, церий,ниобий и т.п. Технология изготовления позисторов близка к процессу производства терморезисторов. Изготовление начинается со взвешивания исходных материалов, измельчения и перемешивания их с дистиллированной водой в фарфоровой шаровой мельнице.Полученная смесь фильтруется, сушится, растираетя в порошок и прокаливается в течение одного часа при температуре 1100-1200 С. В процессе прокаливания смесь образует белые хрупкие куски, которые снова размельчаются и перемешиваются с водой в шаровой мельнице, а затем фильтруются, высушиваются и растираются в порошок. В соответствии с конструкцией позисторов из порошка прессуются диски, пластины или цилиндрики. Для лучшего спрессования к порошку добавляют дистиллированную воду. Спрессованные заготовки обжигают в электропечи при температуре 1300-1400 С в течении 0,5-2ч.На полученную полупроводниковую керамику методом серебрения наносят электроды, обеспечивающие хороший электрический контакт с керамикой. Затем к электродам припаивают токоподводы. В заключение на тело позистора наносится изоляционное покрытие из термостойких эпоксидных или силиконовых смол ипрозводят старение, контроль и маркировка. Основные параметры и характеристики позистора.
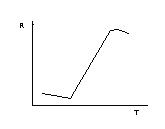
Одним из основных отличий позисторов от терморезисторов являются положительный знак и большая величина ТКС в узком интервале температур, достигающая для отдельных типов позисторов 60-100%/град. Другое отличие состоит в том, что температурная зависимость сопротивления имеет сложный и неоднозначный характер, в силу чего в широком интервале температур её нельзя аппроксимировать экспоненциальным уравнением, свойственным температурной характеристике терморезистора. Наконец, сопротивление позистора зависит не только от температуры образца, но и от величины приложенного к нему напряжения («варисторный эффект»).В связи с этим только на начальном участке ВАХ позистора(при малых напряжениях на образце) температура в любой точке может быть определена по температурной характеристике позистора, что невозможно при больших напряжениях за счет варисторного эффекта. Температурная характеристика позистора – зависимость его электрического сопротивления от температуры, снятая при напряжении, не вызывающем «варисторный эффект»(рис.8).
рис.8 На температурной характеристике можно выделить три участка, соответствующие различным температурным диапазонам. На участках 1 и 3 позистор ведет себя как терморезистор, на участке 2 он имеет положительный ТКС, претерпевающий большие измерения. На этом участке сопротивление позистора возрастает в 3 – 4 тысячи раз. Ширина этого диапазона невелика(50…100 С), а его положение зависит от материала позистора и может менятся в широких пределах.
Температурный коэффициент сопротивления (ТКС) позистора – относительное изменение его сопротивления, измеренного при минимально допустимой мощности рассеяния, на один градус изменения температуры, выраженное в процентах, т.е.
Статическая вольтамперная характеристика позистора (рис.10) это зависимость тока I протекающего через него, от величины приложенного напряжения U в условиях теплового равновесия между позистором и окружающей средой. Таким образом, для каждой точки характеристики справедливо уравнение энергетического баланса P=b(T-T0) P- мощность, рассеиваемая на позисторе b- коэффициент рассеяния T- установившееся значение температуры позистора. T0- температура среды.
1.3. ЕМКОСТНЫЙ МЕТОД(вариант 1) Известно, что емкость С конденсатора является функцией диэлектрической постоянной
В частности, емкость плоского конденсатора с двумя электродами определяется выражением
Изменение емкости С конденсатора согласно формуле (2.10) можно осуществить путем изменения расстояния В простейшем случае емкостный преобразователь состоит из двух параллельных пластин, разделенных воздушным диэлектриком, причем перемещение одной из пластин вызывает изменение емкости конденсатора. На рис.2.6 показано принципиальное устройство емкостного преобразователя. Если вместо одного неподвижного электрода взять два (рис.2.7), то получим дифференциальный преобразователь. Так как изменение емкости конденсатора является однозначной функцией перемещения подвижного электрода, то по изменению емкости можно судить о величине перемещения.
В зависимости от области применения емкостные датчики выполняются по-разному. Так, например, в приборах для измерения давления газа или жидкости одну из пластин делают упругой (подвижной) с таким расчетом, чтобы ее прогиб был пропорционален измеряемому давлению. Вторая пластина образует неподвижный электрод. Так как при прогибе упругая пластина не остается параллельной неподвижному электроду, то изменение емкости не будет пропорциональным прогибу. Однако при малых по сравнению с общим зазором прогибах пластины изменение емкости можно с большой точностью считать пропорциональным прогибу. Емкостные датчики с упругой пластиной (диафрагмой) можно применять для измерения быстроменяющихся давлений. Наивысшая частота, измеряемая таким прибором, ограничена собственной частотой диафрагмы, которая в имеющихся конструкциях приборов доходит до 100000 Гц. Следовательно, при помощи прибора с емкостным датчиком можно получить неискаженную запись переменных давлений, и сил до 25000—30000 Гц (см. гл. VI). Для увеличения чувствительности емкостного датчика следует уменьшать зазор между пластинами, однако при этом возможно замыкание пластин. Это затруднение можно обойти, если заполнить часть зазора диэлектриком с большой диэлектрической постоянной. В этом случае чувствительность датчика возрастает и при тех же перемещениях подвижной пластины можно будет получить значительно большее изменение емкости. Емкостные датчики обладают малой мощностью, особенно на низких частотах. Обычно емкость датчика составляет
Так как мощность измерителя должна быть во много раз меньше мощности датчика, то ясно, что такой измеритель должен обладать высокой чувствительностью. В настоящее время измерителей подобного типа не существует, поэтому емкостные датчики, как правило, работают на повышенных частотах и с применением усилителей. Для преобразования изменения емкости в соответствующее изменение силы тока, напряжения или частоты применяют различные электрические схемы: резонансные, мостовые, электростатические и др. В резонансных схемах емкость датчика является элементом резонансного контура, и изменение емкости вызывает изменение резонансной частоты, что в результате приводит к изменению частоты или амплитуды тока, протекающего по контуру. На рис.2.8 приведена одна из возможных резонансных схем. Резонансный контур LCR питается от генератора Г постоянной частоты. Напряжение и при совпадении собственной частоты контура с частотой колебаний генератора будет максимальным. Если собственная частота контура LCR изменяется вследствие изменения емкости С датчика, то амплитуда напряжения будет изменяться по резонансной кривой (рис.2.9). Выбрав рабочую точку М на прямолинейной части резонансной кривой (от А до В),
получим изменение амплитуды напряжения ± В резонансной схеме на рис.2.10 анодный ток лампового генератора меняется в соответствии с изменением емкости контура LC. К числу преимуществ резонансных схем следует отнести высокую чувствительность и линейную зависимость выходной электрической величины и емкости. Однако в этих схемах трудно получить постоянную настройку, и, следовательно, трудно обеспечить постоянство нуля прибора. В мостовых схемах емкость датчика включается в одно или два плеча и служит переменным элементом моста.
На рис.2.11 приведена мостовая схема с одним переменным плечом, содержащим емкость С датчика. Если на входные зажимы моста подать переменное напряжение, то при равновесии на выходных зажимах b напряжение будет отсутствовать. При изменении емкости С равновесии моста будет нарушаться, вследствие чего на выходных зажимах появится напряжение. Это напряжение, амплитуда которого пропорциональна разбалансу Недостатком мостовых схем для преобразования емкости является трудность достижения равновесия моста из-за не синусоидальности питающего напряжения и неточного выполнения условий равновесия. В электростатических схемах переменная емкость датчика используется для модуляции постоянного напряжения. Падение напряжения на переменной емкости подается на сетку специальной усилительной лампы с большим входным сопротивлением. Подобные схемы удовлетворительно работают только при измерении быстро изменяющихся неэлектрических величин. Емкостный метод измерения имеет ряд преимуществ, как-то: высокую чувствительность, возможность измерения как весьма малых, так и больших перемещений и деформаций, большую точность. К недостаткам следует отнести необходимость применять для питания схем ток повышенной частоты и усилители, а также погрешности от паразитных емкостей.
Общие сведения Принцип действия емкостных датчиков основан на свойстве конденсатора изменять емкость с изменением геометрических размеров или диэлектрической постоянной. При помощи емкостных датчиков можно измерить геометрические размеры, влажность, состав изоляционного материала и т.п. Известно, что емкость плоского конденсатора (пФ)
S – действующая площадь пластин (обкладок), составляющих конденсатор (см2); d – толщина диэлектрика (или зазора), (см). Из формулы (4.1) видно, что емкость может изменяться в зависимости от трех величин - На рис. 4.1а изображен емкостной датчик, в котором измеряемая величина х вызывает изменение зазора d между пластинами, из которых 1 – неподвижная, 2 – подвижная. Такой датчик применяется для измерения небольших перемещений. Если обозначить начальную емкость (до измерения) через С0,а в момент измерения С1, то абсолютное изменение емкости:
а относительное изменение:
где В формуле (4.2) знак + соответствует уменьшению емкости, а – увеличению. Чувствительность емкостного датчика равна отношению относительного приращения емкости к приращению линейного размера
На рис.4.1.б показана зависимость относительного изменения емкости В случае уменьшения зазора В случае увеличения зазора На рис.4.1.в показана схема дифференциального датчика. Применение его позволяет уменьшить действие механической силы и увеличить чувствительность мостовой схемы. Конструкция дифференциального датчика состоит из подвижной пластины 1. Расположенной между двумя неподвижными пластинами 2 и 3. Подвижная пластина закреплена с двух сторон на упругих подвесках 4 и 4’ с малой жесткостью и может перемещаться вверх или вниз под действием измеряемого усилия Р. Во избежание утечки зарядов обе пластины (2 и 3) тщательно изолированы от корпуса изолирующими прокладками 5 и 5I. При перемещении подвижной

пластины емкости верхней и нижней части получают приращение с разными знаками, например На рис.4.2.а показан датчик для измерения линейных перемещений, в котором входная величина х преобразуется за счет изменения площади пластин S. Здесь b, h, d – соответственно ширина, высота и расстояние между обкладками конденсатора. Используя обозначения, принятые на рис.4.1.а, находим абсолютные значения емкости
Обычно для увеличения чувствительности датчика применяют многопластинчатые конденсаторы, в этом случае емкость (пФ)
где S – рабочая площадь пластины (см2); n – общее число пластин; d – расстояние между пластинами (см). Абсолютное изменение емкости:
На рис.2.б изображен датчик роторного типа для преобразования угловых перемещений. Примером такого датчика может быть обычный воздушный конденсатор переменной емкости, применяемый для настройки радиоприемников. Переменной величиной в нем является площадь пластин. В системах автоматики и робототехники такие датчики применяются для преобразования угла поворота в емкость. На рис.4.2.б приняты следующие обозначения: 1 – неподвижная пластина (статор), жестко закреплена на неподвижной детали; 2 – подвижная пластина (ротор), жестко скреплена с осью 3, она может свободно поворачиваться относительно неподвижной пластины 1, при этом расстояние между пластинами остается неизменным Рабочая площадь (заштрихована) зависит от угла поворота Для увеличения емкости датчика применяют систему, состоящую из нескольких подвижных и неподвижных пластин. При этом емкость датчика:
где С0 – начальная емкость датчика; На рис.4.2.в изображен цилиндрический датчик с переменной площадью для измерения перемещений более 1мм. В этом случае:
где l – длина перекрываемой части обкладок конденсатора; rBH, rH – радиусы внутренней и внешней обкладок. При смещении внутреннего цилиндра (обкладки) на величину
Достоинством данного датчика является большая емкость при не больших габаритах по сравнению с другими типами датчиков. Из анализа работы датчиков, рассмотренных выше (за исключением датчика изображенного на рис.4.1.а), видно что между изменением емкости Емкостные датчики с переменной диэлектрической проницаемостью могут быть двух типов: с перемещением диэлектрика перпендикулярно или параллельно плоскости пластин. На рис.4.3.а изображен датчик для измерения уровня жидкости (первый тип). Здесь 1- бак, 2- жидкость. При различных величинах диэлектрической проницаемости воздуха Общая емкость:
где С1 – емкость верхней части бака высотой Так как диэлектрическая проницаемость токонепроводящей среды значительно больше диэлектрической проницаемости воздуха (
где Св- начальная емкость датчика при отсутствии диэлектрика;
на рис.4.3.в показан второй тип датчика, в котором диэлектрическая проницаемость изменяется по высоте d параллельно плоскости пластин. Такой датчик может быть применен для измерения толщины материала из диэлектрика, например, толщины полиэтиленовой пленки. Датчик второго типа можно рассматривать как плоско – параллельный конденсатор с двухслойным диэлектриком, емкость которого:
где d – зазор; d1, d2 – соответствующие толщины диэлектриков (воздуха, диэлектрика); Если принять на d, то получим
Анализ формулы (4.13) показывает, что изменение емкости Относительное изменение емкости колеблется в очень широких пределах Достоинством емкостных датчиков являются: а) высокая чувствительность и быстродействие, что позволяет измерять быстропеременные параметры (давление, вибрацию, ускорение и т.п.) б) малый вес и размеры; в) небольшое обратное воздействие на исследуемый параметр. К недостаткам следует отнести: а) большое внутреннее сопротивление датчика; б) потребность в источнике напряжения повышенной частоты; в) необходимость тщательной тренировки датчика; г) влияние внешних факторов (влажность, температура).
1.4. ИНДУКТИВНЫЙ МЕТОД(вариант1) В электрических методах измерения, основанных на измерении индуктивности L, используется свойство катушки изменять свое реактивное (индуктивное) сопротивление при изменении некоторых ее параметров, определяющих величину индуктивности. Для получения возможно большей индуктивности катушка малых габаритов, как правило, выполняется с сердечником из ферромагнитного материала. Выражение для определения индуктивности такой катушки имеет вид
где l0 и So — величина и площадь воздушного зазора; l1 и S1 —длина средней линии и площадь сечения сердечника;
сердечника. Изменение индуктивности L согласно формуле (2.12) можно осуществлять путем изменения числа витков Если катушка, индуктивность которой изменяется пропорционально измеряемой неэлектрической величине, включена в электрическую цепь, то по изменению силы тока в цепи или напряжения на клеммах прибора можно судить об этой величине. При применении индуктивных преобразователей для измерения медленно изменяющихся величин для их питания можно обойтись переменным током промышленной частоты. При измерении индуктивными преобразователями величин, изменяющихся с высокой частотой, необходимо выполнить два условия: во-первых, частота тока, питающего преобразователь, должна быть в несколько раз выше частоты изменения измеряемой величины, во-вторых, собственные частоты элементов (обычно якорей или мембран), служащих для преобразования измеряемой неэлектрической величины в изменение индуктивности, должны быть значительно выше наивысшей частоты измеряемой величины.
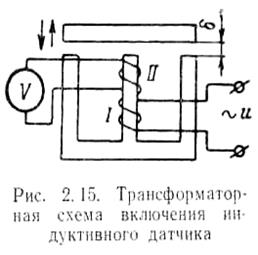
Принципиальная схема индуктивного преобразователя очень проста (рис.2.12). На железном сердечнике 1 намотана катушка 2. Если изменять воздушный зазор Для преобразования изменения индуктивности датчика в изменение силы тока, напряжения или частоты имеется ряд схем, которые можно разделить на резонансные, нерезонансные недифференциальные и дифференциальные. Простейший пример резонансной схем ы приведен на рис.2.13. В этой схеме емкость С постоянна, а индуктивность L катушки изменяется за счет изменения воздушного зазора Если питающее напряжение и стабилизировано по амплитуде и частоте, то резонансные схемы, обладающие большой чувствительностью, обеспечивают также достаточную точность измерения. Примеры нерезонансных недифференцированных схем приведены на рис.2.12; 2.14 и 2.15. В схеме на рис.2.14 воздушный зазор катушки I, а, следовательно, и сила тока в ней изменяются, а в катушке II остаются неизменными. Логометр Л, включенный в схему прибора в качестве указателя, будет измерять отношение токов в катушках I и II. Очевидно, показание логометра будет являться функцией величины зазора
трансформатора. Если напряжение питания и постоянно по амплитуде и частоте, то сила тока во вторичной обмотке II будет изменяться в соответствии с изменением зазора На рис.2.16 и 2.17 приведены примеры дифференциальных схем. В схеме с логометром (рис.2.16) изменение воздушного зазора
На рис.2.17 приведена схема моста с двумя взаимно изменяющимися плечами L1 и L2. Изменение индуктивностей осуществляется посредством перемещения общего сердечника из среднего положения под действием механических сил. Подобные схемы часто применяются в приборах для измерения переменных давлений, ускорений и деформаций. Рассмотрим основные элементы расчета индуктивных датчиков. Исходными данными для расчета являются тип датчика, вид и размеры магнитной системы, и ход якоря. Определению подлежат электрические параметры катушки (полное и омическое сопротивления, число витков, сила тока), мощность, потребляемая датчиком, частота питающего напряжения. В качестве примера рассмотрим магнитную систему датчика, представленного на рис.2.12. Если будет известна зависимость приращения сопротивления
то можно будет определить указанные выше параметры датчика. Для определения
где R — сопротивление катушки постоянному току;
Комплексное магнитное сопротивление ZM имеет вещественную часть, характеризующую реактивное сопротивление катушки, и мнимую часть, характеризующую активное сопротивление катушки, обусловленное потерями на гистерезис и вихревые токи. При расчете комплексного магнитного сопротивления ZM встречается ряд затруднений. Прежде всего, эффективная площадь So [см. формулу (2.12)] воздушного зазора Кроме того, при применении магнитопроводов из сплошного куска (а не листового) стали начинает сказываться поверхностный эффект. Неравномерное распределение магнитного потока по сечению магнитопровода, свойственное переменным магнитным полям, крайне затрудняет определение магнитного сопротивления ZM. При этом, чем выше частота питающего напряжения, тем более выражен поверхностный эффект. Следствием поверхностного эффекта является увеличение комплексного магнитного сопротивления ZM магнитопроводов. На основе теоретических исследований Л. Р. Нейман вывел формулу для расчета комплексного магнитного сопротивления при наличии поверхностного эффекта:
где l и р — длина и периметр магнитопровода;
RM — активная составляющая магнитного сопротивления; Хш — реактивная составляющая магнитного сопротивления;
В том случае, когда магнитный поток в магнитопроводе близок к равномерному, определение комплексного магнитного сопротивления производится по формуле
где Р — мощность потерь на гистерезис и вихревые токи; Ф —магнитный поток; S — пл   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (2.1)
(2.1) - мгновенное значение напряжения ПТР, В;
- мгновенное значение напряжения ПТР, В; - мгновенное значение тока через ПТР, А;
- мгновенное значение тока через ПТР, А;
 , (2.2)
, (2.2) можно построить динамические характеристики
можно построить динамические характеристики



 диэлектрика, расстояния
диэлектрика, расстояния  между электродами и эффективной площади
между электродами и эффективной площади  электродов:
электродов: (2.10)
(2.10) . (2.11)
. (2.11)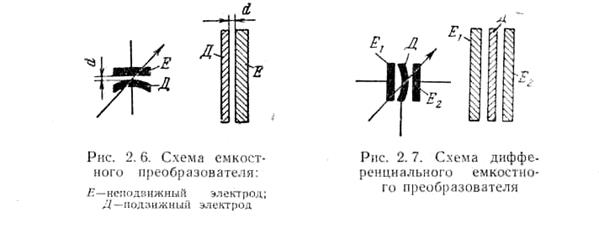
 мкмкф, а изменение ее не превышает 10% от общей емкости. Если, например, к емкостному датчику с С =100 мкмкф приложено напряжение u =115 в частотой
мкмкф, а изменение ее не превышает 10% от общей емкости. Если, например, к емкостному датчику с С =100 мкмкф приложено напряжение u =115 в частотой  Гц, то мощность Р датчика равна.
Гц, то мощность Р датчика равна. ва
ва
 , пропорциональное изменению емкости ±
, пропорциональное изменению емкости ±  С. Таким образом, это не что иное, как известная схема амплитудной модуляции. Напряжение и после усиления и детектирования может быть подано на указательную или записывающую систему.
С. Таким образом, это не что иное, как известная схема амплитудной модуляции. Напряжение и после усиления и детектирования может быть подано на указательную или записывающую систему.
 (4.1)
(4.1) – относительная диэлектрическая проницаемость (пФ/см).
– относительная диэлектрическая проницаемость (пФ/см).
 , (4.2)
, (4.2) - изменение (смещение) зазора между пластинами,(см рис. 4.1а).
- изменение (смещение) зазора между пластинами,(см рис. 4.1а). (4.3)
(4.3) от относительного изменения зазора
от относительного изменения зазора  .
. кривая А круто поднимается вверх и при
кривая А круто поднимается вверх и при  стремиться к бесконечности. При этом увеличивается чувствительность датчика.
стремиться к бесконечности. При этом увеличивается чувствительность датчика. кривая Б при
кривая Б при  положе, чем кривая А, поднимается вверх и приближается к предельному значению
положе, чем кривая А, поднимается вверх и приближается к предельному значению  .При этом чувствительность датчика уменьшается. Обе кривые (А,Б) будут иметь линейный характер в том случае, когда зазор изменяется не более чем на 5%, т.е
.При этом чувствительность датчика уменьшается. Обе кривые (А,Б) будут иметь линейный характер в том случае, когда зазор изменяется не более чем на 5%, т.е  .При этом относительное изменение емкости приблизительно равно относительному зазору (независимо от направления смещения подвижного электрода). Следует отметить, что уменьшение расстояния между электродами ограничено электрическим пробоем диэлектрика и ограничено 30мк.
.При этом относительное изменение емкости приблизительно равно относительному зазору (независимо от направления смещения подвижного электрода). Следует отметить, что уменьшение расстояния между электродами ограничено электрическим пробоем диэлектрика и ограничено 30мк. и
и  . Эти емкости включаются в соседние плечи мостовой схемы, благодаря чему увеличивается напряжение в измерительной диагонали моста. Для получения высокой чувствительности емкостные датчики включаются в резонансные контуры.
. Эти емкости включаются в соседние плечи мостовой схемы, благодаря чему увеличивается напряжение в измерительной диагонали моста. Для получения высокой чувствительности емкостные датчики включаются в резонансные контуры. (4.4)
(4.4) (4.5)
(4.5) (4.6)
(4.6) пластины 2.
пластины 2. (4.7)
(4.7) – изменение площади на единицу поворота
– изменение площади на единицу поворота  (4.8)
(4.8) абсолютное изменение емкости:
абсолютное изменение емкости: (4.9)
(4.9) и изменением площади
и изменением площади  (или перемещением
(или перемещением  ) существует линейная зависимость.
) существует линейная зависимость. и перемещающегося диэлектрика
и перемещающегося диэлектрика  (жидкость) образуются два конденсатора С1 и С2,соединенные параллельно. Эквивалентная схема рассматриваемого датчика приведена на рис.4.3.б.
(жидкость) образуются два конденсатора С1 и С2,соединенные параллельно. Эквивалентная схема рассматриваемого датчика приведена на рис.4.3.б. (4.10)
(4.10) , заполненная воздухом; С2 – емкость нижней части бака, заполненная жидкостью, уровень
, заполненная воздухом; С2 – емкость нижней части бака, заполненная жидкостью, уровень  которой изменяется;
которой изменяется;  - ширина обкладки;
- ширина обкладки;  - полная высота электрода.
- полная высота электрода. ), то емкость такого датчика при изменении уровня меняется очень резко и в широких пределах. Учитывая, что
), то емкость такого датчика при изменении уровня меняется очень резко и в широких пределах. Учитывая, что  (диэлетрическая проницаемость жидкости), преобразуем (10) к виду:
(диэлетрическая проницаемость жидкости), преобразуем (10) к виду: (4.11)
(4.11) - абсолютное изменение емкости.
- абсолютное изменение емкости. (4.12)
(4.12) - соответствующие диэлектрические проницаемости воздуха и диэлектрика.
- соответствующие диэлектрические проницаемости воздуха и диэлектрика. и разделить числитель и знаменатель (4.12)
и разделить числитель и знаменатель (4.12) или
или (4.13)
(4.13) будет линейным в том случае, если пространство между пластинами заполнено диэлектриком с весьма малой толщиной и
будет линейным в том случае, если пространство между пластинами заполнено диэлектриком с весьма малой толщиной и  .
. и зависит от чувствительности элемента, а также величины абсолютной емкости
и зависит от чувствительности элемента, а также величины абсолютной емкости  , (2.12)
, (2.12) — число витков катушки;
— число витков катушки; и
и  — соответственно магнитная проницаемость воздуха и материала
— соответственно магнитная проницаемость воздуха и материала , длины l0 или площади So воздушного зазора и длины l1, площади S1 или магнитной проницаемости
, длины l0 или площади So воздушного зазора и длины l1, площади S1 или магнитной проницаемости 
 посредством перемещения якоря 3, например, под действием силы F, то коэффициент самоиндукции L катушки 2 будет изменяться, вследствие чего сила тока i, протекающего по катушке, также будет изменяться. Таким образом, каждому значению силы F и зазора
посредством перемещения якоря 3, например, под действием силы F, то коэффициент самоиндукции L катушки 2 будет изменяться, вследствие чего сила тока i, протекающего по катушке, также будет изменяться. Таким образом, каждому значению силы F и зазора  , то амплитуда тока i при изменении зазора
, то амплитуда тока i при изменении зазора  . Обычно величина полного воздушного зазора в 3—5 раз превышает величину перемещения якоря
. Обычно величина полного воздушного зазора в 3—5 раз превышает величину перемещения якоря  .
.

 катушки от перемещения якоря
катушки от перемещения якоря  , (2. 13)
, (2. 13) , (2.14)
, (2.14) — круговая частота;
— круговая частота; — число витков катушки;
— число витков катушки; , (2. 15)
, (2. 15) — удельная проводимость материала магнитопровода;
— удельная проводимость материала магнитопровода; —магнитная проницаемость, определяемая из основной кривой намагничивания при напряженности поля, равной напряженности на поверхности магнитопровода.
—магнитная проницаемость, определяемая из основной кривой намагничивания при напряженности поля, равной напряженности на поверхности магнитопровода.
 , (2.16)
, (2.16)